





Klasyczne i satelitarne techniki pomiarowe
Badania z wykorzystaniem klasycznych i satelitarnych technik pomiarowych miały na celu:
- oceny dokładności i powtarzalności utworzenia NMT z wykorzystaniem pomiarów punktowych technologią tachimetryczną oraz RTK/RTN,
- ocena dokładności odbiorników GNSS,
- weryfikację przydatności metody interferometrii satelitarnej oraz metody fotogrametrycznej z wykorzystaniem bezzałogowych statków powietrznych dla potrzeb wyznaczenia przemieszczeń pionowych,
- badanie zgodności wyznaczenia współrzędnych metodą RTK/RTN z wykorzystaniem różnych sieci stacji referencyjnych,
- ocena powtarzalności pomiarów przemieszczeń z wykorzystaniem różnych technologii pomiarowych.
W tym zakresie badań zaangażowany był zespół AGH z Wydziału Geodezji Górniczej i Inżynierii Środowiska (Katedra Geodezji Inżynieryjnej i Budownictwa) w składzie: dr inż. Rafał Kocierz, dr hab. inż. Tomasz Owerko, dr inż. Łukasz Ortyl, dr inż. Przemysław Kuras.
Badania wykonano na obszarze 3 poligonów badawczych:
- 10-M (Mydlniki) – na poligonie badawczym znajdującym się na obszarze należącym do AGH zespół Katedry Geodezji Inżynieryjnej i Budownictwa AGH przeprowadził prace badawcze mające na celu weryfikację dokładności numerycznego modelu terenu utworzonego na podstawie pomiarów różnymi technologiami pomiarowymi oraz ocenę dokładności współczesnych odbiorników GNSS;
- 12-G (Śląsk) – pomiary doświadczalne na poligonie 12-G na którym trwała eksploatacja górnicza miały na celu weryfikację przydatności metody interferometrii satelitarnej oraz metody fotogrametrycznej z wykorzystaniem bezzałogowych statków powietrznych dla potrzeb wyznaczenia przemieszczeń pionowych;
- 13-Cz (Czernichów) - na niniejszym poligonie badawczym zespół Katedry Geodezji Inżynieryjnej i Budownictwa przeprowadził prace badawcze mające na celu weryfikację dokładności numerycznego modelu terenu utworzonego na podstawie pomiarów różnymi technologiami pomiarowymi, ocenę zgodności wyników pomiarów RTK/RTN wykonanych z wykorzystaniem różnych sieci stacji referencyjnych oraz wyznaczono typową powtarzalność pomiarów przemieszczeń wykonanych różnymi technologiami pomiarowymi
Badania terenowe trwały łącznie 25 dni.
Wykonano pomiar 53 km ciągów.
Pozyskano i przetworzono informację o około 6.5 tyś punktach wysokościowych pomierzonych metodami klasycznymi i satelitarnymi.
W dalszej części strony czytelnik znajdzie bardziej szczegółowy opis prac wykonanych na poszczególnych poligonach badawczych.
10-M Mydlniki
Na poligonie badawczym 10-M (Mydlniki) zespół Katedry Geodezji Inżynieryjnej i Budownictwa przeprowadził prace badawcze mające na celu weryfikację dokładności numerycznego modelu terenu utworzonego na podstawie pomiarów różnymi technologiami pomiarowymi oraz ocenę dokładności współczesnych odbiorników GNSS.
W dniach 21-22.02.2017 na terenie łąk należących do AGH przeprowadzono pomiary terenowe mające na celu ocenę przydatności punktowych metod pomiaru rzeźby terenu, takich jak tachimetria oraz satelitarny pomiar RTK/RTN do utworzenia numerycznego modelu terenu. Wykonano łącznie cztery niezależne pomiary przez dwóch operatorów. Pomiary wykonano wielosystemowym dwuczęstotliwościowym odbiornikiem Leica GX1230GG w trybie RTN z wykorzystaniem strumienia poprawek sieciowych, generowanych przez stacje sieci NadowskiNET oraz zrobotyzowanym tachimetrem Lecia TCRA1102plus (Rysunek 1).

Rysunek 1 Pomiar rzeźby terenu z wykorzystaniem tachimetru zrobotyzowanego
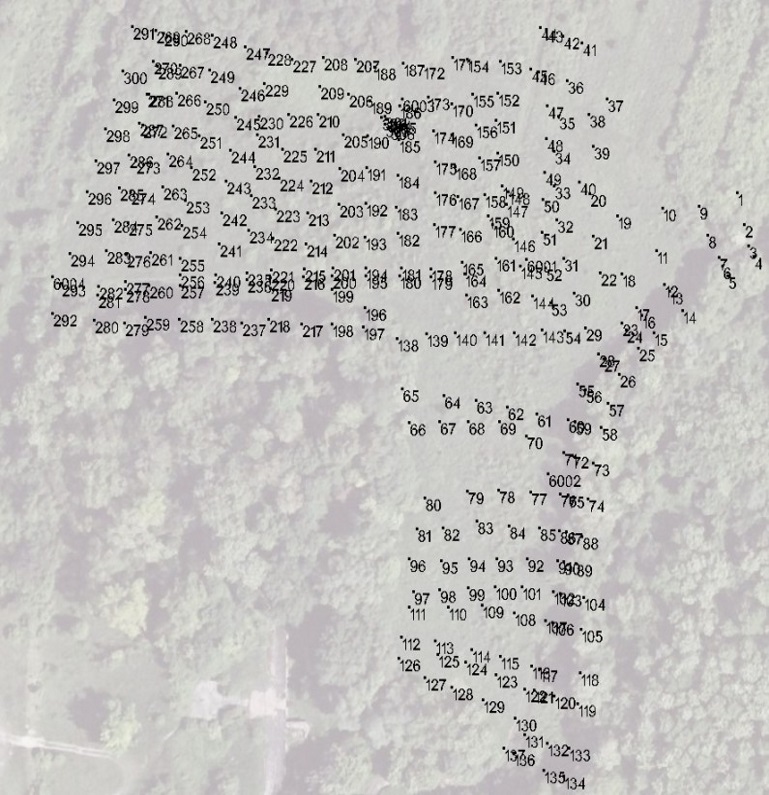
W wyniku prac pomiarowych wyznaczono współrzędne przestrzenne łącznie 1634 punktów (Rysunek 2). Na ich podstawie zbudowano cztery modele powierzchni terenu w postaci siatki typu GRID z wykorzystaniem programu Surfer firmy Golden Software. Założono gęstość modelu na poziomie 0.1 metra oraz przyjęto, iż do interpolacji wysokości w punktach węzłowych siatki wykorzystana zostanie funkcja minimalnej krzywizny. Wybór ten był podyktowany charakterem terenu, który w większości przypadków nie zawiera miejsc o szybko zmieniających się formach.
 |
 |
| Zestaw 1 - Pomiar RTN | Zestaw 2 – Pomiar RTN |
 |
 |
| Zestaw 3 – Pomiar biegunowy 3D | Zestaw 4 – Pomiar biegunowy 3D |
Rysunek 2 Rozkład przestrzenny punktów pomiarowych na polu testowym
Wygenerowane modele terenu zostały zweryfikowane przez pomiar przekroju kontrolnego, dla którego punkty zostały pomierzone co 5 m. Z wykorzystaniem funkcji Residuals programu Golden Software Surfer wykonano zrzutowania punktów kontrolnych na wygenerowane wcześniej modele 3D i wyznaczono ich modelowe wysokości. Na ich podstawie obliczono odchyłki wysokościowe, które przedstawiono na Rysunku 3.
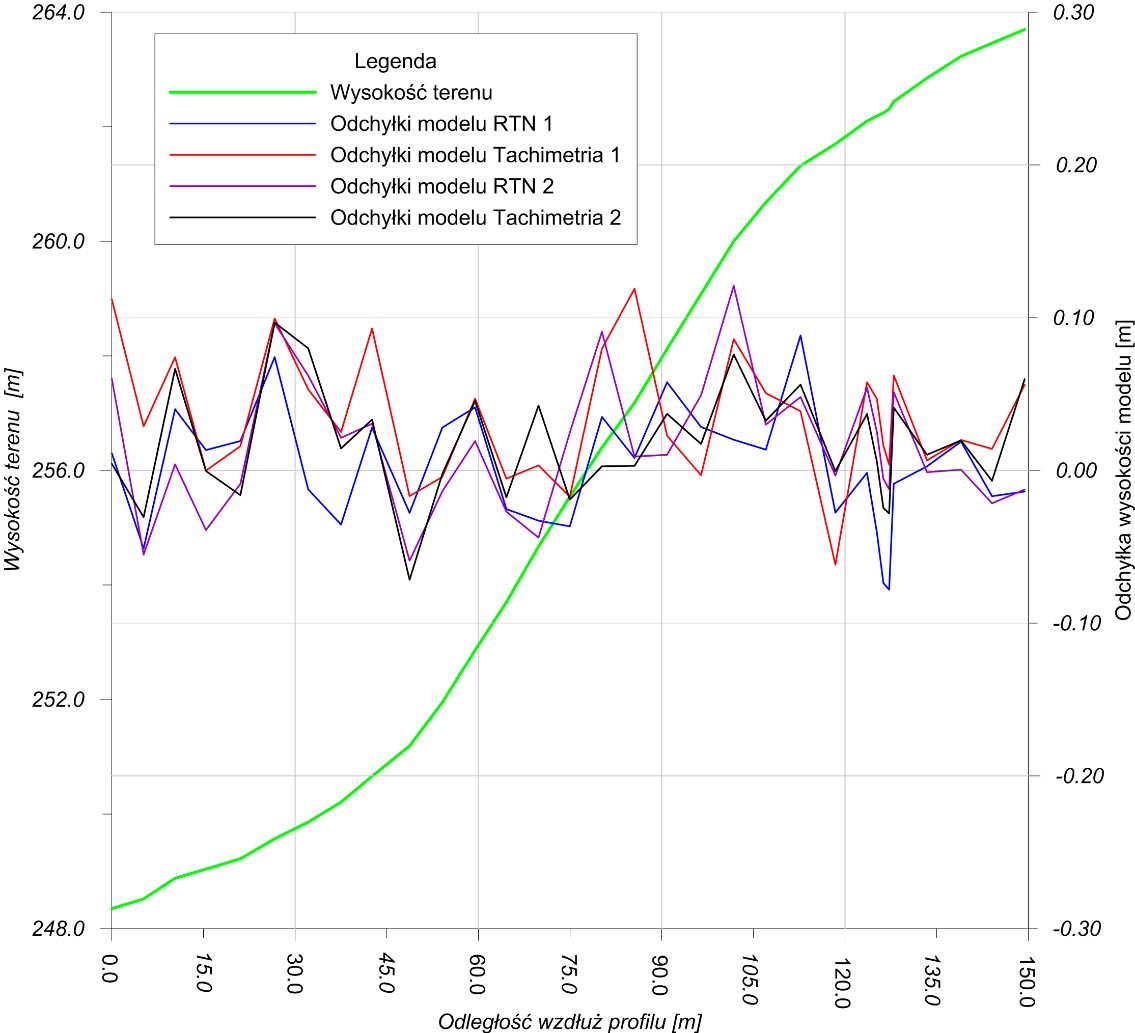
Rysunek 3 Wizualizacja odchyłek profilu kontrolnego
W dniach 24-28.11.2017 zrealizowano pomiary, których celem była ocena wpływu wykorzystania wielofunkcyjnych odbiorników GNSS przy wyznaczaniu pozycji metodą RTK. W tym celu zastosowano odbiornik GS16 firmy Leica, który to umożliwia odbiór sygnałów z takich systemów jak: GPS, Glonass, Beidou oraz Galileo.

Rysunek 4 Odbiornik Leica GS16 w czasie pomiarów testowych
Dla potrzeb nawiązania posłużono się siecią stacji Leica SmartNet. Jak się okazało podczas testów, w Krakowie jako stacja referencyjna nie został zainstalowany odbiornik umożliwiający odbiór sygnałów z satelitów Galileo, dlatego system ten nie został wykorzystany w niniejszych badaniach. Dokładność pomiaru współrzędnych punktów pomiarowych wyznaczono w oparciu o pełną procedurę testową opisaną w normie ISO 17123-8, dotyczącą wyznaczenia dokładności pomiarów metodą RTK. Metodologię testową rozszerzono o drugą bazę, która znalazła się na obszarze o bardziej przysłoniętym horyzoncie. Założono również pięć punktów w pobliskim lesie, w przypadku których testowano wpływ dodatkowych systemów w trudnych warunkach pomiarowych. Dodatkowo współrzędne punktów testowych wyznaczono w oparciu o pomiary statyczne GNSS oraz pomiary kątowo-liniowe wykonane precyzyjnym tachimetrem TCRA1102 firmy Leica. Całość pomiarów nawiązano również do sieci stacji Leica SmartNET.

Rysunek 5 Szkic rozmieszczenia punktów
Analiza pozyskanego zbioru obserwacji umożliwia analizę wpływu wzrostu liczby systemów satelitarnych na dokładność i niezawodność wyznaczenia pozycji w trudnych warunkach pomiarowych.
Na tej samej bazie testowej, w dniach 24-28.11.2017, dokonano oceny przydatności kinematycznej metody PPP SmartLink firmy Leica. Badania te wykonano również zgodnie z pełną procedurą testową opisaną w normie ISO 17123-8. W wyniku przeprowadzonych badań wyznaczono powtarzalność pomiaru dla bazy o odsłoniętym i przysłoniętym horyzoncie. Bardzo istotną kwestią jest dokładność pomiaru, która została zweryfikowana przez analizę zgodności średnich współrzędnych z współrzędnymi nominalnymi wyznaczonymi metodą statyczną w nawiązaniu do państwowej osnowy geodezyjnej.
Baza testowa w Mydlnikach była również wykorzystana dla potrzeb oceny rzeczywistej dokładności odbiorników nawigacyjnych (turystycznych i klasy GIS). Podczas testów wykorzystano trzy odbiorniki klasy nawigacyjnej umożliwiające odbiór sygnałów jedynie dla satelitów systemu GPS (Garmin GPSMAP76, Garmin Legend HCx i Leica GS20) oraz jeden precyzyjny odbiornik Leica GS16 umożliwiający odbiór sygnałów satelitarnych z systemów GPS, Glonass, Beidou oraz Galileo. Każdym z odbiorników wykonano pięciokrotny pomiar współrzędnych punktów bazy testowej, a następnie otrzymane wyniki porównano ze współrzędnymi nominalnymi, a różnice poddano analizie statystycznej. W przypadku odbiornika Leica GS16 został włączony zapis surowych obserwacji, które następnie wczytano do programu Leica GeoOffice, a następnie przeliczono współrzędne metodą kodową z wykorzystaniem następującej kombinacji satelitów: GPS, GPS+Glonass, GPS+Beidou oraz GPS+Glonass+Beidou. Wyniki pomiarów pozwoliły na wyznaczenie precyzji oraz błędów średnich położenia punktów z wykorzystaniem różnych odbiorników wykorzystujących pomiar pseudoodległości przy wyznaczaniu współrzędnych. Poddano również ocenie wpływ wykorzystania odbiorników wielosystemowych przy wyznaczaniu pozycji tzw. metodą kodową. W tym celu wykorzystano pomiary pseudoodległości odbiornika Leica GS16.
12-G – Ślask
Na poligonie badawczym 12-G zespół Katedry Geodezji Inżynieryjnej i Budownictwa przeprowadził prace badawcze mające na celu weryfikację przydatności metody interferometrii satelitarnej oraz metody fotogrametrycznej z wykorzystaniem bezzałogowych statków powietrznych dla potrzeb wyznaczenia przemieszczeń pionowych. W tym celu zespół Państwowego Instytutu Geologicznego przeanalizował występowanie deformacji na obszarze miasta Ruda Śląska (Rysunek 6).
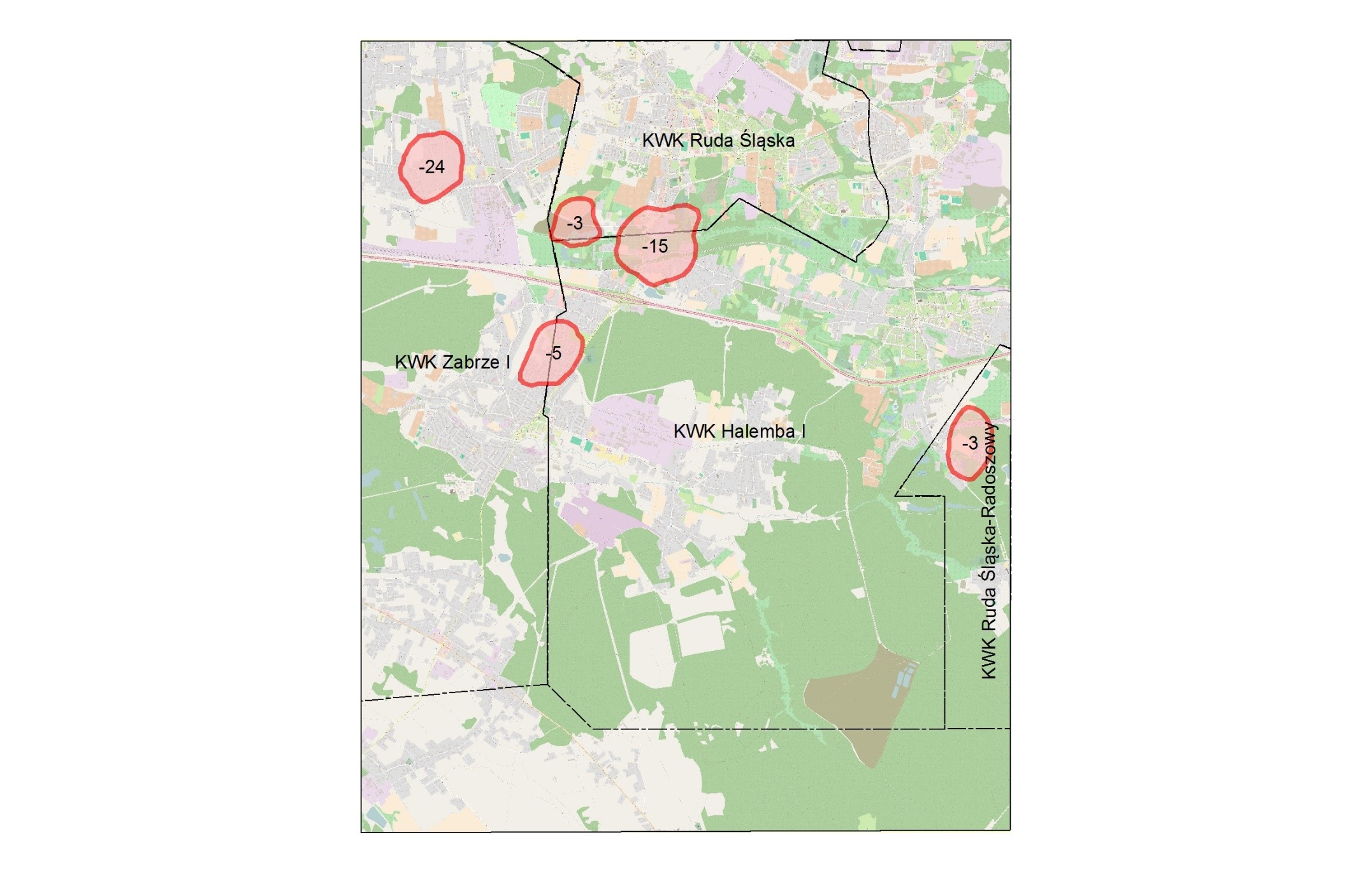
Rysunek 6 Analiza przemieszczeń pionowych na obszarze Rudy Śląskiej (PIG)
Na tej podstawie wybrano dwa obszary:
- zachodni, przy ulicy Szkolnej w dzielnicy Bielszowice,
- wschodni, przy ulicy 1 Maja w dzielnicy Wirek,
na których założono linie obserwacyjne o łącznej długości 4.4 km. Przebieg jednej z linii obserwacyjnej przedstawiono na Rysunku 7. Pomiar wysokości punktów został nawiązany do reperów wysokościowej osnowy państwowej oraz wykonany tak, aby maksymalny błąd średni wyznaczenia wysokości najmniej korzystnego z 110 reperów nie przekraczał ±1 mm.
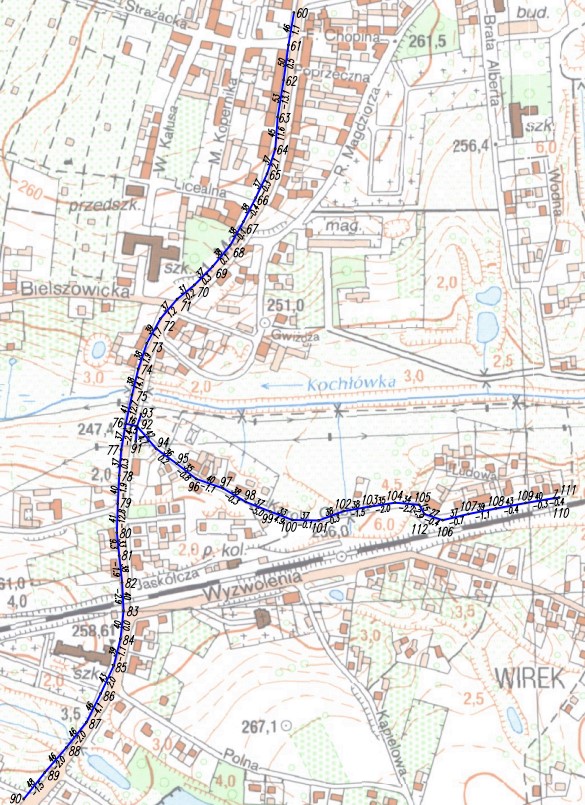
Rysunek 7 Szkic rozmieszczenia punktów na obszarze wschodnim
Pomiary niwelacyjne przeprowadzono w sześciu okresach pomiarowych zsynchronizowanych z czasem przelotu satelitów Sentinel-1 rejestrujących dane niezbędne do wyznaczenia przemieszczeń metodą interferometryczną InSAR. Łącznie wykonano pomiar ciągów niwelacji o długości ponad 53 km. Na podstawie pomiarów oraz ich opracowania wyznaczono przemieszczenia pionowe wszystkich punktów sieci (Rysunek 8). Zauważyć można postępujący trend wzrostu przemieszczeń, którego prędkość maksymalna wyniosła 1.6 m/rok.
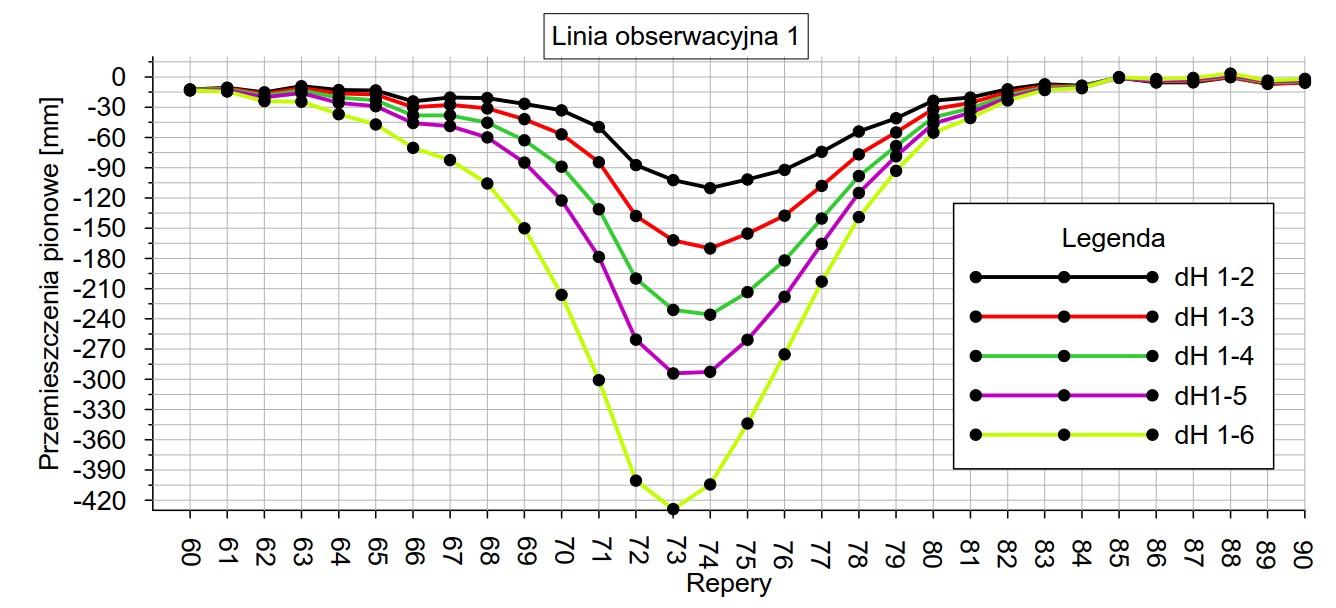
Rysunek 8 Przykładowy wykres uzyskanych przemieszczeń pionowych
Uzyskane wartości obniżeń terenu porównano z wartościami wyznaczonymi metodą różnicową InSAR oraz PSInSAR. Pomiary interferometrii mikrofalowej opracowano również metodą PSInSAR, która cechuje się większą dokładnością w przypadku liniowego trendu przemieszczenia. Jak wykazały badania, w przypadku obniżeń na terenach górniczych, metoda PSInSAR pozwoliła jedynie na wyznaczenie przemieszczeń punktów o małych wartościach przemieszczeń, zaś w pozostałych przypadkach okazała się nieskuteczna.
W czasie drugiego oraz szóstego pomiaru wykonano również nalot fotogrametryczny z wykorzystaniem bezzałogowego statku powietrznego. Na podstawie pozyskanych zdjęć cyfrowych oraz specjalnie zamierzonych fotopunktów wykonano przetwarzanie w programie Agisoft PhotoScanner, mające na celu wygenerowanie numerycznego modelu pokrycia terenu dla obu epok pomiarowych. Na podstawie NMPT wyznaczono wysokości terenu w miejscach odpowiadających punktom linii pomiarowych oraz obliczono zmiany wysokości. Tak uzyskane dane zestawiono z przemieszczeniami pozyskanymi metodą niwelacji geometrycznej. Ponieważ dokładność metody niwelacji precyzyjnej przewyższa dokładność metod fotogrametrycznych z wykorzystaniem bezzałogowych statków powietrznych, wartości różnic przemieszczeń można było potraktować jako błędy prawdziwe i oszacować dokładność metody opartej na zdjęciach.
W celu wyznaczenia przemieszczeń punktów rozproszonych na większym obszarze wykorzystano metodę fazowych pomiarów statycznych GNSS (Rysunek 9). Rozmieszczając punkty pomiarowe kierowano się mapą koherencji sygnałów mikrofalowych rejestrowanych przez satelitę Sentinel-1, a pomiar wykonano w dwóch epokach pomiarowych (13.04 i 20.05.2017r.) z wykorzystaniem wielosystemowych dwuczęstotliwościowych odbiorników GNSS firmy Leica. Sesje pomiarowe wynoszące 45 minut, oraz odpowiednia struktura wektorów pozwoliła na wyznaczenie przemieszczeń pionowych z błędem średnim ±4mm. Mimo odpowiedniego rozmieszczenia punktów, jedynie dla trzech z nich (z 8) wyznaczono przemieszczenia metodą DInSAR.
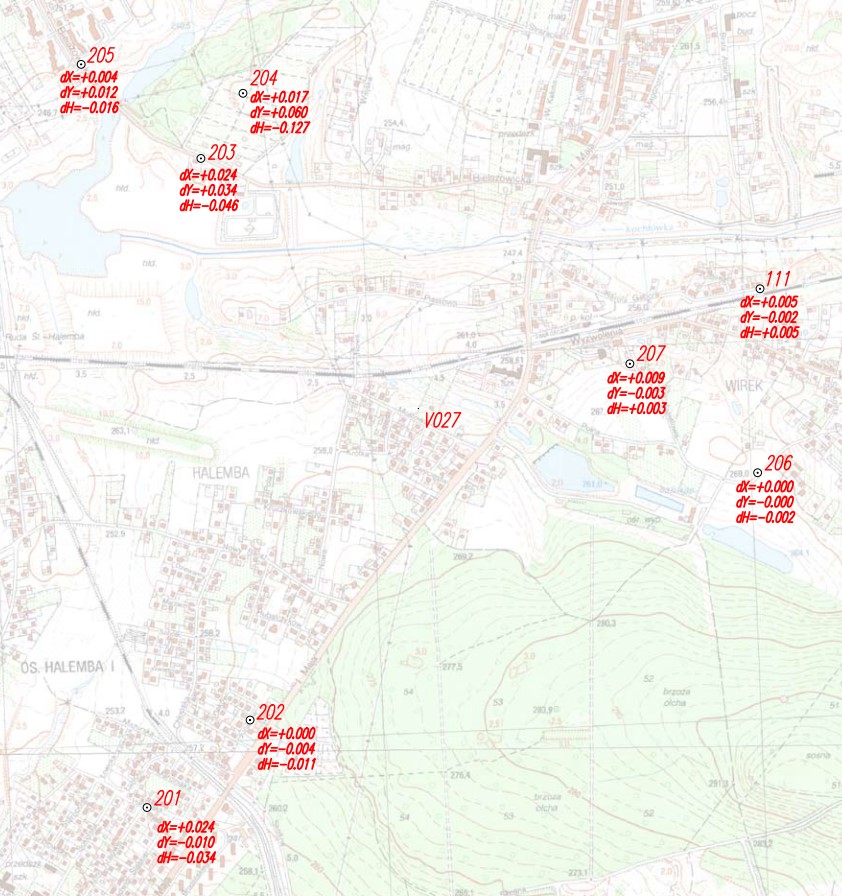
Rysunek 9 Szkic rozmieszczenia punktów mierzonych technologią GNSS
13-Cz (Czernichów)
Na poligonie badawczym 13-Cz (Czernichów) zespół Katedry Geodezji Inżynieryjnej i Budownictwa przeprowadził prace badawcze mające na celu weryfikację dokładności numerycznego modelu terenu utworzonego na podstawie pomiarów różnymi technologiami pomiarowymi, ocenę zgodności wyników pomiarów RTK/RTN wykonanych z wykorzystaniem różnych sieci stacji referencyjnych oraz wyznaczono typową powtarzalność pomiarów przemieszczeń wykonanych różnymi technologiami pomiarowymi.
Pomiary których celem była ocena powtarzalności wyznaczenia numerycznego modelu terenu na podstawie pomiaru z wykorzystaniem metody satelitarnej RTK/RTN GNSS przeprowadzono w dniach 2017-02-17 oraz 2017-03-01 przez dwóch niezależnych operatorów z wykorzystaniem dwusystemowych dwuczęstotliwościowych odbiorników GX1230GG firmy Leica (Rysunek 10).
 |
 |
Rysunek 10 Pomiar współrzędnych punktów z wykorzystaniem metody RTN GNSS
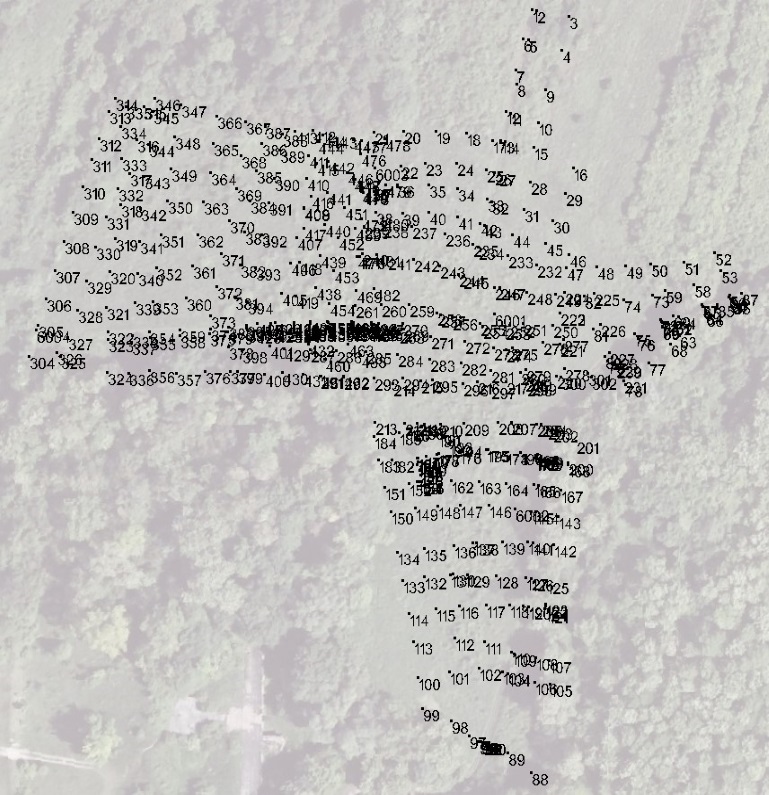
W ciągu dwóch dni pomiarowych pomierzono łącznie 4566 punktów wysokościowych, z czego operator 1 2191 pkt, zaś operator 2 2375 punktów (Rysunek 11).

Rysunek 11 Szkic punktów pomierzonych przez operatora nr 2
Na podstawie obu wykonanych pomiarów opracowano w programie C-GEO dwa niezależne numeryczne modele terenu typu TIN (Rysunek 12). Model GRID nie jest na takich terenach wskazany, gdyż aby oddać prawidłowo zmienność terenu, wymiar oczka siatki musiałby być stosunkowo mały (rzędu 10cm), co powoduje niepotrzebny wzrost objętości końcowego modelu. Ważnym elementem przy budowie NMT skarp czy innych form, dla których występują nagłe zmiany kształtu powierzchni terenu, jest definicja linii nieciągłości.
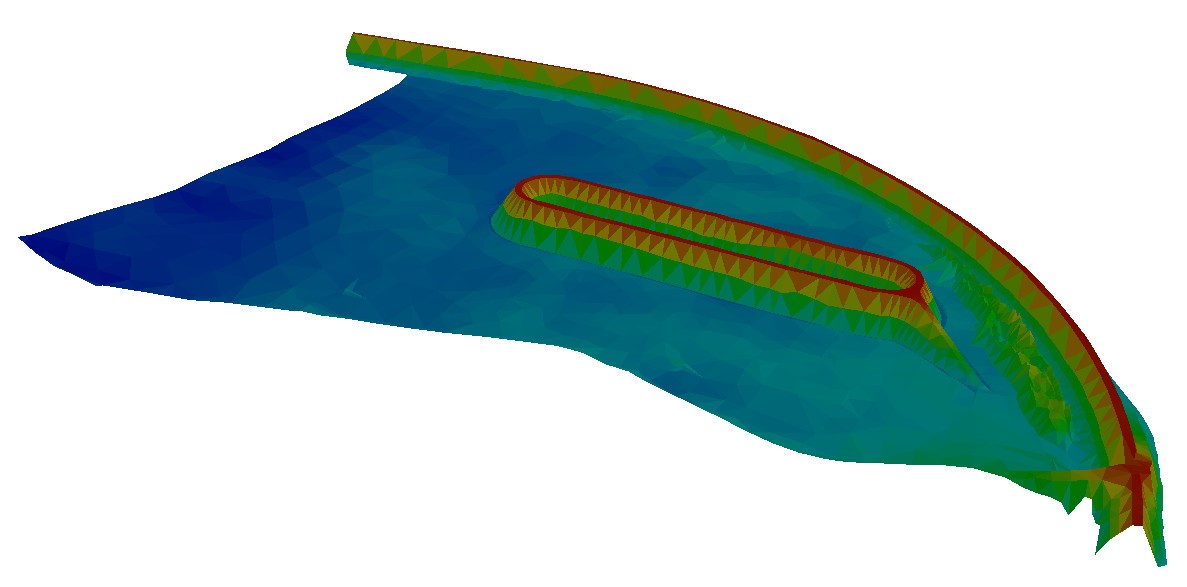
Rysunek 12 Wizualizacja 3D NMT (pomiar nr 1)
W celu oceny zgodności obu niezależnych modeli wykonano rzutowanie punktów jednego z modeli na drugi i wyznaczono różnice wysokości punktów modelowych oraz rzeczywistych. Przykładowy histogram różnic wysokości modelu przedstawia Rysunek 13.
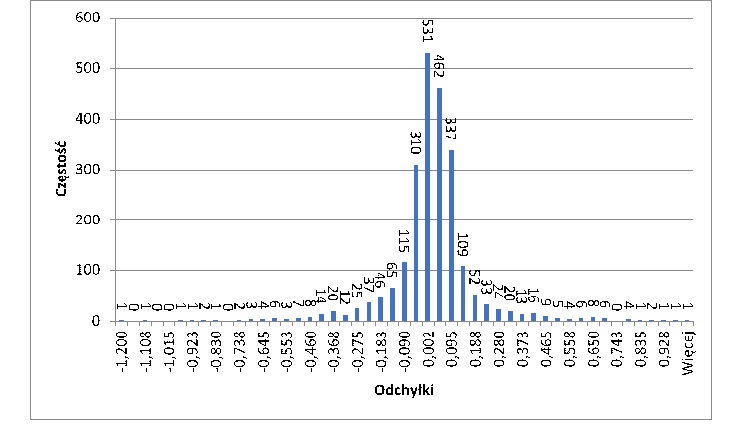
Rysunek 13 Histogram odchyłek pomiaru nr 2 względem modelu nr 1
W dniu 2017-06-05 wykonano testy zgodności wyznaczenia współrzędnych metodą RTK/RTN z wykorzystaniem różnych sieci stacji referencyjnych. Do testów wykorzystano dwusystemowy dwuczęstotliwościowy odbiornik GNSS Triumph-1 firmy Javad (Rysunek 14). Metodą statyczną wyznaczono współrzędne filaru obserwacyjnego wykorzystywanego do precyzyjnego pomiaru przemieszczeń, a następnie z wykorzystaniem różnych strumieni danych pochodzących z różnych sieci przeprowadzono pomiar RTK oraz RTN.

Rysunek 14 Odbiornik GNSS na filarze obserwacyjnym
Wykorzystano następujące strumienie i sieci:
- AGH stacja KRAW (RTK);
- ASG-EUPOS VRS (RTN);
- Leica SmartNET VRS (RTN);
- Leica SmartNET Najbliższa stacja (RTK);
- NET VRS (RTN);
- NET VRS (RTN);
- NET Najbliższa stacja (RTK);
- pomiar nawigacyjny w układzie WGS84 – bez poprawek.
Wykonany wielokrotny pomiar współrzędnych punktu zainstalowanego na filarze obserwacyjnym pozwolił na oszacowanie wzajemnej zgodności wyników wyznaczenia współrzędnych na podstawie danych z różnych serwisów.
W celu oceny powtarzalności (a tym samym dokładności) pomiarów przemieszczeń z wykorzystaniem różnych technologii pomiarowych, zastabilizowano linię obserwacyjną o długości ok 1 km i zawierającej 37 punktów zastabilizowanych bolcami pomiarowymi firmy Goecke (Rysunek 15).

Rysunek 15 Szkic lokalizacyjny testowej linii obserwacyjnej w Czernichowie
W dniach 2017-11-30 – 2017-12-02 oraz 2017-12-14 – 2017-12-17 wykonano dwa niezależne pomiary współrzędnych punktów pomiarowych z wykorzystaniem następujących technologii pomiarowych:
- Pomiary statyczne GNSS z wykorzystaniem odbiorników GX1230GG oraz SR530 firmy Leica;
- Pomiary kinematyczne RTK i RTN GNSS z wykorzystaniem odbiornika GX1230GG;
- Pomiary niwelacyjne z wykorzystaniem niwelatora kodowego DNA03 firmy Leica oraz dwóch łat inwarowych;
- Pomiary kątowo-liniowe z wykorzystaniem precyzyjnego tachimetru TCA2003 firmy Leica.
Zebrane dane zostały poddane wstępnej ocenie dokładności, a następnie wyrównaniu metodą najmniejszych kwadratów Gaussa w celu wyznaczenia ostatecznych wartości współrzędnych. Ponieważ obszar testowy nie znajduje się na terenach objętych eksploatacją górniczą założono, iż w dwutygodniowym przedziale czasu teren nie podlega deformacjom. Przyjmując powyższe, wyznaczone przemieszczenia są jedynie rezultatem błędów pomiarowych (czynności pomocniczych oraz instrumentów pomiarowych), a także ewentualnym ruchom bolców pomiarowych.
Zebrane podczas dwóch epok pomiarowych dane pozwoliły na praktyczną weryfikację dokładności wyznaczenia przemieszczeń klasycznymi i satelitarnymi metodami pomiarowymi.
Szczegółowe wyniki walidacji przekazano w formie sprawozdania do NCBiR, a cześć przeprowadzonych i planowanych analiz będzie podstawą przygotowania publikacji.

